

※ この記事は、avr6502さんと、ふぁらおKJさんのスポンサードで公開されています。
NT名古屋でのこと。カンパ用の貯金箱に、百均の金色のウンコの貯金箱を使っていると、小さいガキが「わー、ウンコだ〜」と寄ってくるのが観測された。中には「ソフトクリーム!」という面白い娘もいたりした。
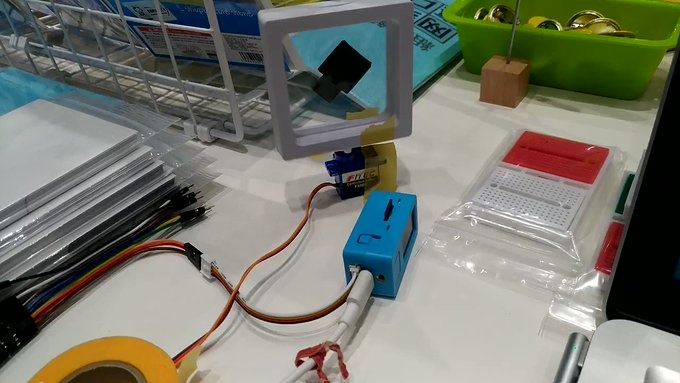
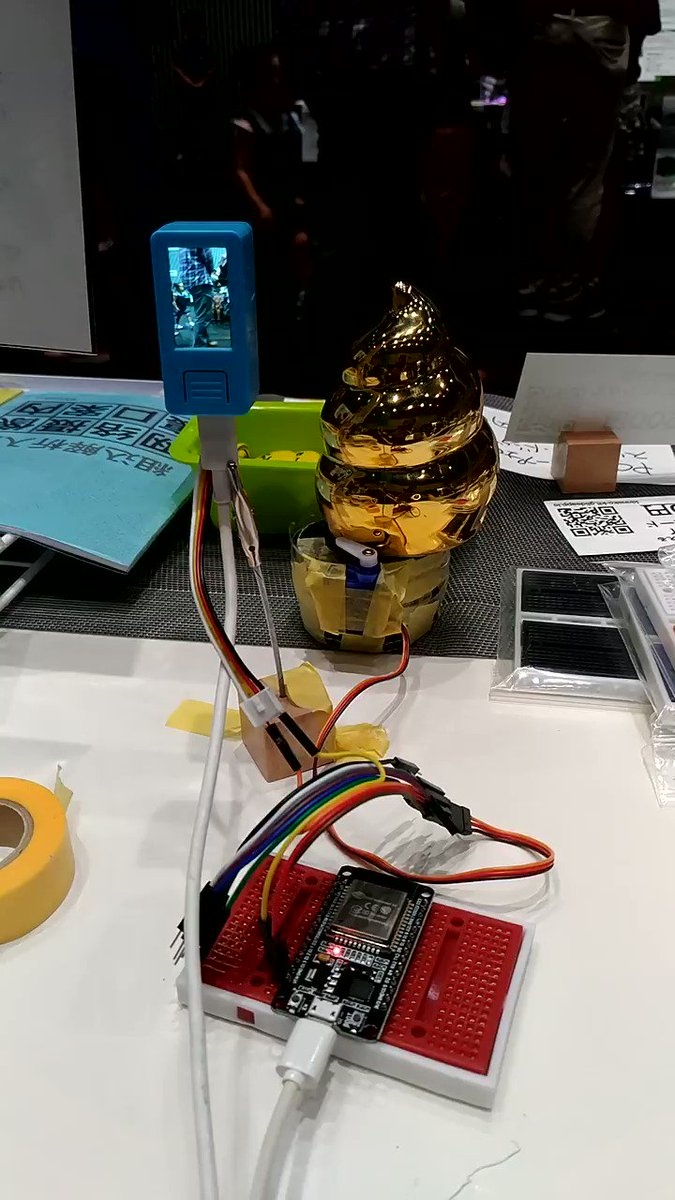
展示には光り物と動き物があると、人寄せになる。金のウンコを餌に、ちょっとびっくりさせるようなデモを作ってみようと思いついた。NT名古屋での展示があまりに暇だったのでw 基本的には顔認識して、金のウンコを少し動かすというデモになる。 顔認識は、たまたまその時持っていたM5StickVを使うことにした。 金のウンコを動かすには、サーボモーターを使った。これもなぜか荷物の中に入っていた。 残りの材料は、その日の宿の豊田市駅のそばの100均で調達した。ウンコを支える軸には、ノック部に真珠のような玉飾りがついた極細のシャープペンシル。シャープペンシルを支える台には、飲み終わったペットボトルの下の部分、そこに工作用のスチレンボードを丸く切って何枚か入れる。それに、サーボモーターをマスキングテープで貼り付ける。
サーボの制御をMiax.pyでやるのは比較的簡単だった。シリアル接続したMacからコンソールを使って動作確認し、パラメーターを決める。
動画はこちら:https://twitter.com/kinneko/status/1175297196800897025
サーボモーターの電源は、M5StickVから供給していたが、どうもパワー不足で動作が不安定になるので、Node-MCU32Sから電源だけをもらうようにした。 360度連続回転サーボしか持ってこなかったので、現在の角度を決め打ちできないのがつらい。現在の角度を絶対角度にマップするのにカウンタとタイマ使うような実装はめんどくさい。素直にSG90にしたらよかった。

動画はこちら:https://twitter.com/kinneko/status/1175300897275990016
M5StickVとサーボモーターの接続には、Groveケーブルを使う。これも荷物に入っていた。そこからの接続線は、オスオスのジャンパケーブルを使う。これも、普通常備しているでしょw
サーボはでかすぎて、ウンコの中には入らなかった。後ろに隠す感じの配置にする。
カメラでの顔認識のコードは、標準のboot.pyを使う。これに、サーボの制御部分を書き加える。 SDカードに書き込み、単体で動作できるようにした。

動画はこちら:https://twitter.com/kinneko/status/1175642907962830849
というわけで、完成した。
動画はこちら:https://twitter.com/kinneko/status/1175648278693609472
遠くの顔にも反応してしまうので、近眼用のレンズ付けるか、顔の面積で判断する改造が必要そうw とりあえずは、子供の顔が入る角度を決めることで落ち着いた。
しかし、誰もビビってくれない...
説明しても、iPhoneで顔認証が普通なのか、この小さい中で顔認識が動作しているのを説明しても特に感動はしてもらえない感じだった。テックデモは難しい。
NT鯖江でも、少し改造して出しておきました。

オリジナル投稿:
顔認識でガキを驚かすデモ|kinneko|pixivFANBOX
https://kinneko.fanbox.cc/posts/625268

{kind=link}